模型空洞识别
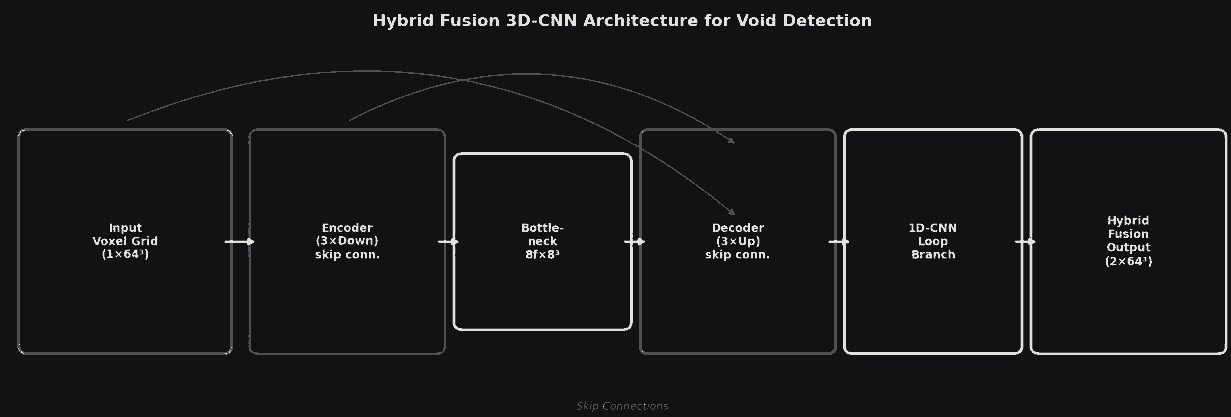
异构融合 3D-CNN
异构融合 3D-CNN
空洞感知网络
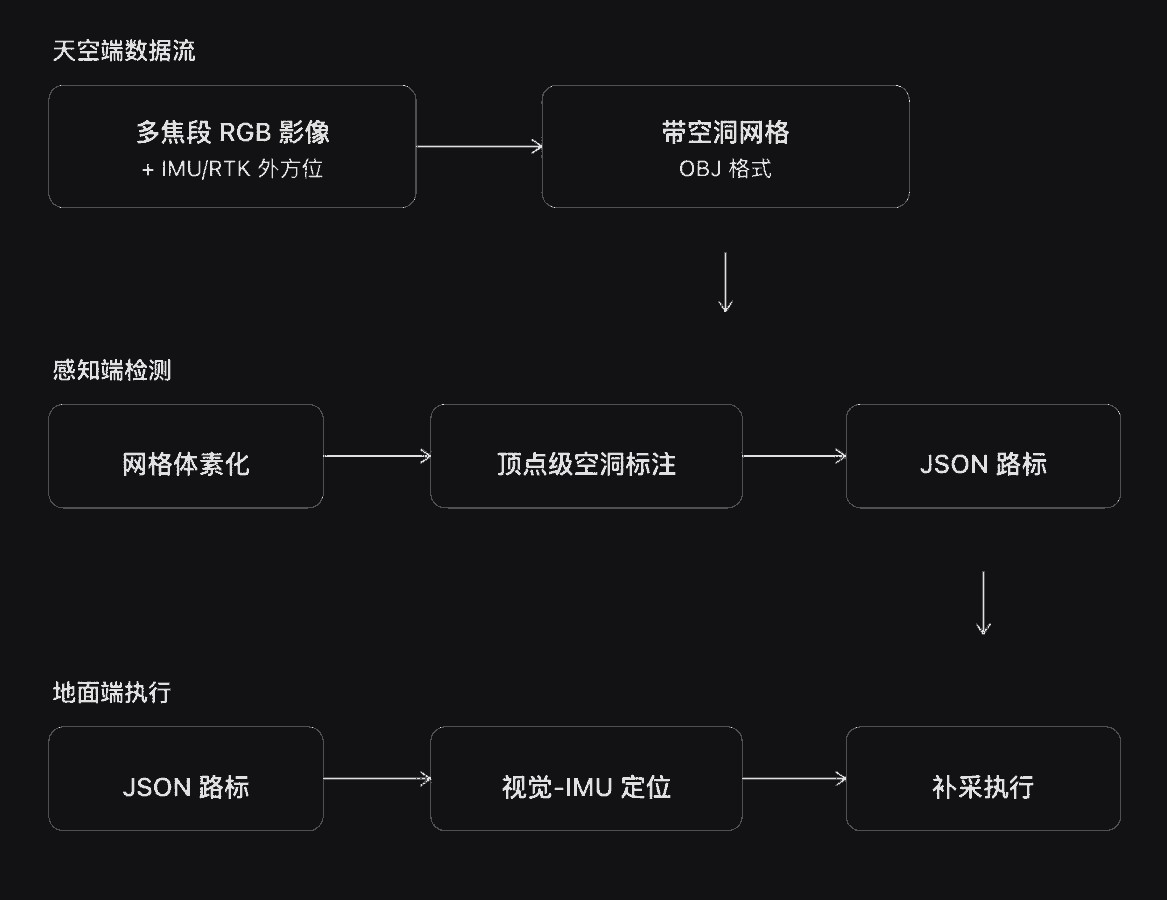
古建筑三维重建中,因视角遮挡、结构复杂产生大量未建模空洞。 我们提出业界创新的异构融合框架,将体素语义信息、边界几何特征与拓扑结构信息统一建模。
94.2%
空洞检测精确率
91.8%
空洞检测召回率
±2.5mm
边界定位精度
技术架构
A
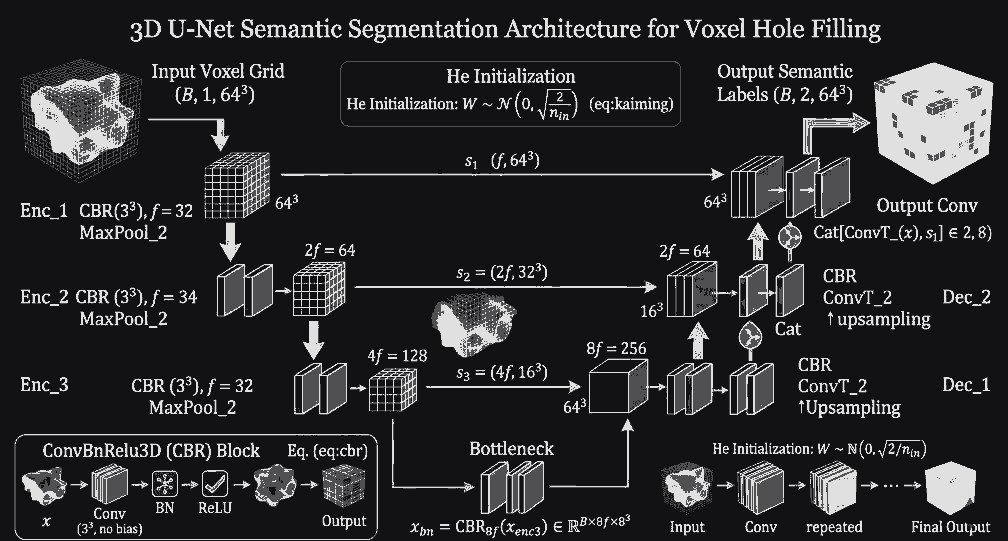
3D U-Net 体素分割
处理体素化输入,提供高召回率的全局语义覆盖,理论感受野达 44³ 体素格。
B
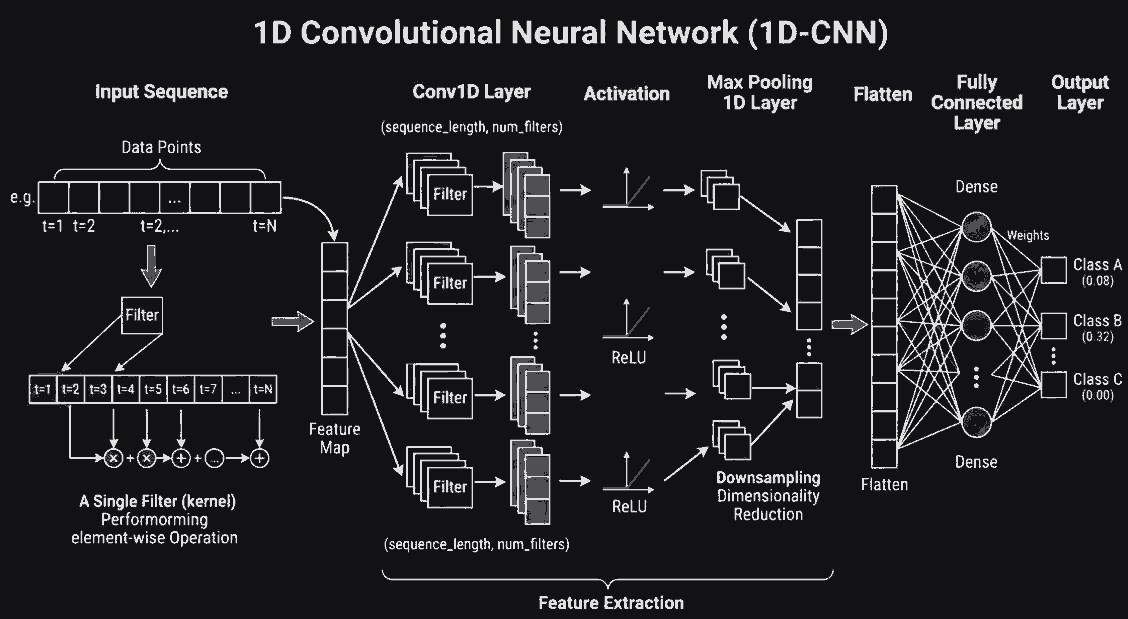
1D-CNN 边界环路建模
多尺度卷积(核尺寸 3/5/7)提取边界顶点序列特征,SE 通道注意力增强关键维度。
C
MLP 拓扑分类
基于 7 维环路聚合特征进行整体判别,过滤噪声环路,提供语义约束。
多粒度几何特征提取包含 10 维顶点特征(高斯曲率、法向量方差、局部折角等)与 7 维环路聚合特征(平面性、圆形度、法向量一致性等)。 采用 Dice + Focal 复合损失函数处理类别失衡(正负样本比 1:15~1:20), Dice 系数达 0.720,IoU 达 0.564。